 3G Eden
3G Eden RSS
RSS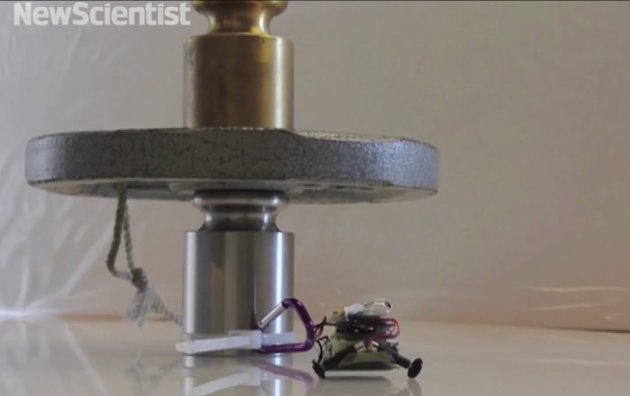
对于科学家来说,仿生机械真的大有发展机会,但除了 Boston Dynamics 开发的那些巨兽之外,小小机械人也是科学家的另一个开发焦点。Stanford University 的研究员最近公开了数款大力士小机器人,当中有的更能把等同自身重量 2,000 倍的东西拉动呢。
它们的模仿对象为很热门的壁虎(脚),研究员表示由于壁虎在负担着高重量的情况下仍能以四脚贴在墙上,但要走到时也可以轻松地提起脚掌前行,他们想复制的就是这样的能力了。而由他们开发出的小机械人脚上有很多微小的橡胶钉,当施加压力时它们就会弯曲,在增加跟地面接触的面积的同时加大黏力,反之亦然。在前行之时,前腿踏步但后腿保留在原地,待前腿在更远的地方站稳脚步之后,后腿才向前踏,这样就可以稳步前行了。
据视频显示,小机器人们的移动原理也是差不多,其中一只 9 克的机器人能拉动 1 公斤的东西;另一只只重 20 毫克的则可移动 500 毫克的纸夹,研究员更指出组装它时要用显微镜协助了。不过最强则要数一只名为 μTug 的小机器人了,它只重 12 克,但有能力拉动等同自身重量 2,000 倍的东西,真的了不起,研究员以此比喻为一个人拉动一条蓝鲸呢。可以看看它们做出壮举的视频啊。
转自 http://cn.engadget.com/2015/04/26/stanford-gecko-robots/?ncid=rss_truncated
时间:2015-04-27 08:37
来源:cn.engadget.com
作者:Marco So
原文链接