 Linuxeden开源社区
Linuxeden开源社区首次实现盈利的 DeepMind 突然官宣:收购物理模拟引擎 MuJoCo。
但这还没完,他们同时宣布将对 MuJoCo 开源!
这波买来给大家用的霸气操作让网友们直呼喜大普奔。
要知道,由于在动态多点接触(如灵活手指操作)的场景里有明显优势,MuJoCo 可以说是机器人研究人员的首选模拟器。
像这种人类肌腱、骨骼动态模拟,于它而言都是小 case。

但它一直以来都需要付费使用,而且还很贵。
有人就表示在自己读大学时,曾因为 MuJoCo 太贵而没有继续学习 RL。
因此,DeepMind 这次开源可以说是为机器人开发者带来福音。
支持肌腱、布料仿真
MuJoCo 是多关节接触动力学(Multi-Joint Dynamics with Contact)的缩写,它由华盛顿大学 Emo Todorov 教授开发,2015 年由 Roboti LLC 作为付费产品推出。
MuJoCo 结合了广义坐标模拟和优化后的接触动力学,这使它能够模拟完整的物理运动。
要知道,许多模拟器都是把运动稳定性放在准确性之前考虑的,比如它们可能忽略陀螺效应,但这会偏离现实情况。
相比之下,MuJoCo 更加严格地还原现实世界中的物理运动。
像牛顿摆的现象,它都能很好模拟。
失重情况下的还原也非常真实:

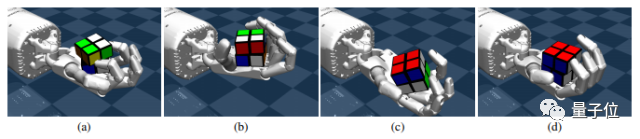
更让人惊艳的,还有 MuJoCo 对于人体关节、肌肉复杂运动的模拟。
许多机械手的研究,都是先在 MuJoCo 中模拟和验证的。
此外,MuJoCo 还能灵活将仿真步骤拆开执行,或者只执行仿真流程的一部分 (如不计算逆动力学)。
而且支持软体材料,如绳子、布料的稳定性仿真。
为了提高仿真性能,MuJoCo 做了 AVX 指令等大量优化,是极少的选择 C 语言来实现的现代物理引擎之一。
而由 C 语言编写,能够让它很容易转化为其他架构。同时,独创的 MJCF 建模格式,相比 URDF 模型具有易读性、灵活配置等优点。
传送门
不过网友们发现,目前开源的还没有源代码。
DeepMind 表示,将努力在 2022 年发布代码库。
此外,MuJoCo 2.1 的相关信息也已经公布。
官网地址:
https://mujoco.org/
来源:IT之家